Mobility Scooter Cruise Control Circuit!




Please see the videos I made for this project here:
https://youtu.be/cJlvoGe_nG0, and here: https://youtu.be/ayKPxF8_fws
This project is designed to help persons with disabilities who:
a) have trouble walking and need a mobility scooter assistive device and
b) have arthritis, carpal tunnel, or other hand / arm disabilities.
It is a hack I implemented in my own mobility scooter out of sheer necessity many years ago and has since grown in popularity among the my friends with disabilities (aka my crip fam): It's a simple Cruise Control Hack!
I have been using a purely mechanical version for years and have designed this new board using 74 digital logic. The entire thing should cost <$10 and will prove a wonderful alternative for those people wanting to explore the world, live, work, and play but are currently thwarted by the limited use scooters on the market.
The idea is simple: install this board between the throttle potentiometer and the CPU as well as the 'key' signal which turns the mobility scooter on. It will switch between a 'dummy load' couple of rheostats that have the throttle at 'full speed' All mobility scooters on the market have an addition knob for speed control which can then be used instead of the painful squeezing of the handle bars. The entire thing turns on and off with a giant button, and a second cutoff button can be installed for safety.
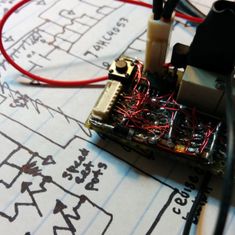
The circuit uses about .40 cents worth of ICs. They are:
2x 74HC053, 1x 74HC14, and 1x &4HC74
Then there are:
2x Trim Potentiometers, 2x LEDs, and 2x Buttons
I have also been testing and thinking a lot about safety implementation. I hope to invest more R&D into a suitable proximity sensor setup so the cruise control circuit will automatically cut off the motor before running into something. This is very feasible, though there are many different sensors I would love to test out, such as the fancy long-range models that Sharp makes, like here:
It's a remarkably low-cost design with people's low budget (living on disability welfare) kept firmly in mind.
hella crips gonna be driving around more! and in less pain. I mean, I think thats a lotta awesome!